Lyft發布無人駕駛汽車的開發數據庫
為了促進無人駕駛汽車的發展,Lyft今天發布了一組無人駕駛汽車的開發數據,該公司稱這以數據庫是同類數據中規模最為龐大的。它以現有的nuScenes格式免費提供,該格式最初由Aptiv開發。
“我們預計無人駕駛汽車將極大地重新定義交通的未來,”Lyft表示,“當這一技術完全實現時,有望釋放出無數的社會、環境和經濟效益。因此,我們的目標是增強社區的能力,促進進一步的發展,并從先進的工業自動駕駛汽車項目的角度分享我們對未來機遇的看法。”
除了超過55000人工標記的3D注釋幀流量代理以外、這一數據庫包含七個攝像頭的比特流和三個激光雷達傳感器,再加上可驅動的地面地圖和一個潛在的高清空間頻率的語音地圖。該語音地圖囊括了超過4000的小巷,197人行橫道,60個停車標志,54停車區域,8個減速裝置和11個減速帶。Lyft表示,這些樣本是從福特“Fusion”無人駕駛汽車車隊通過在一個有限制的地理區域種行駛而采集的。他們每輛車都配備了一個40電波的車頂激光雷達和40電波的保險杠激光雷達,一個寬視場相機,以及一個長焦距相機,這兩臺相機安裝角度微微向上傾斜,以便探測交通信號燈。
在發布數據庫的同時,Lyft宣布了一項工程比賽,面向那些對該數據庫包含的示例構建機器學習模型感興趣的開發人員。Lyft將提供2.5萬美元的現金獎勵,并派出頂級選手參加12月的NeurIPS大會。
該數據庫是由Lyft的5級團隊編制的。該團隊由300多名工程師、應用研究人員、產品經理、運營經理以及更多致力于構建無人駕駛拼車系統的人組成。自2017年7月成立以來,這一團隊開發了新的3D分割框架、新的車輛能效評估方法,以及使用眾包地圖跟蹤車輛移動的新技術。
2018年3月,Lyft開始在公共道路上測試無人駕駛汽車。一年前,Lyft完成了在私人道路上的測試,并推出了員工試駕。另外,今年5月,該公司與谷歌母公司Alphabet’s Waymo合作,讓后者的客戶可以通過Lyft在亞利桑那州鳳凰城的應用程序叫到無人駕駛的Waymo汽車。此外,該公司還與無人駕駛汽車行業的初創企業Aptiv展開了持續合作。Aptiv為Lyft在拉斯維加斯的客戶提供一小批無人駕駛汽車。
今年6月,在加州長灘舉行的IEEE計算機視覺和模式識別(CVPR) 2019年大會上,Waymo發布了一套用于自動駕駛的高質量多模態傳感器數據集。它擁有約3000個駕駛場景,總計16.7小時60萬幀的視頻數據,約2500萬個3D邊界框和2200萬個2D邊界框。
其他類似的開源集合包括街道級圖像的Mapillary’s Vistas數據集、用于移動機器人和自動駕駛研究的KITTI數據集,以及戴姆勒(Daimler)、馬克斯普朗克信息學研究所(Max Planck Institute for Informatics)和達姆斯塔德理工大學(TU Darmstadt Visual Inference Group)開發和維護的Cityscapes數據集。
(選自:Venturebeat原作者:Kyle Wiggers編譯:網易智能 參與:Yuki)
相關推薦
-
 Android 12“App Pairs”功能:允許用戶并排使用兩個應用
Android 12“App Pairs”功能:允許用戶并排使用兩個應用
-
 NASA新火箭關鍵測試不幸失敗 美登月計劃或被迫推遲?
NASA新火箭關鍵測試不幸失敗 美登月計劃或被迫推遲?
-
 迅雷高速通道破解方法 迅雷高速通道如何破解
迅雷高速通道破解方法 迅雷高速通道如何破解
-
 ubuntu手機操作系統 手機版Ubuntu將給哪些人帶來好處?
ubuntu手機操作系統 手機版Ubuntu將給哪些人帶來好處?
-
 電腦開關機音樂下載 電腦開關機音樂設置教程
電腦開關機音樂下載 電腦開關機音樂設置教程
-
 去年12月中國手游發行商全球收入排名:騰訊第一
去年12月中國手游發行商全球收入排名:騰訊第一
-
 長城汽車申請新商標曝光啦!
長城汽車申請新商標曝光啦!
-
 網友曬“哈哈哈”頻率 有的人居然一年哈了8.6萬次
網友曬“哈哈哈”頻率 有的人居然一年哈了8.6萬次
-
 華碩x88s拆機教程 華碩x88s筆記本參數詳解
華碩x88s拆機教程 華碩x88s筆記本參數詳解
-
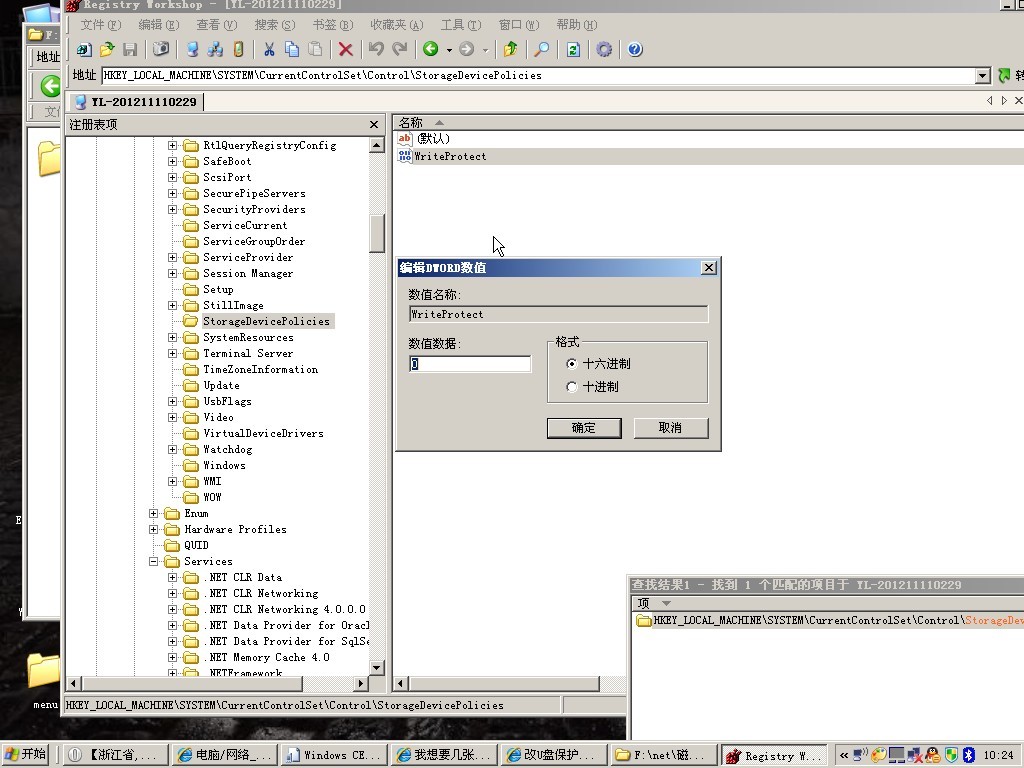 改U盤保護 詳解“若沒有StorageDevicePolicies項則
改U盤保護 詳解“若沒有StorageDevicePolicies項則
-
 攝像頭安裝程序安裝步驟圖文詳解
攝像頭安裝程序安裝步驟圖文詳解
-
 IE臨時文件夾在哪?如何更改Internet臨時文件夾位置?
IE臨時文件夾在哪?如何更改Internet臨時文件夾位置?
-
 快用蘋果助手如何安裝?安裝不了究竟怎么回事
快用蘋果助手如何安裝?安裝不了究竟怎么回事
-
 速看!金陵通介紹視頻誤曝光,Apple Pay 正測試支
速看!金陵通介紹視頻誤曝光,Apple Pay 正測試支
-
 聯想旭日C430A-PX配置性能如何
聯想旭日C430A-PX配置性能如何
-
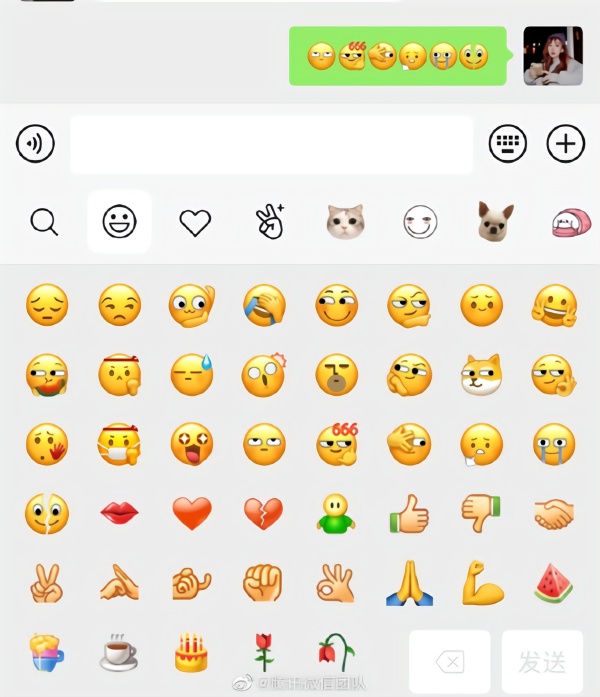 微信上線6個新表情 快更新看看
微信上線6個新表情 快更新看看
-
 2020中國軟件百強榜單公布 華為蟬聯第一
2020中國軟件百強榜單公布 華為蟬聯第一
-
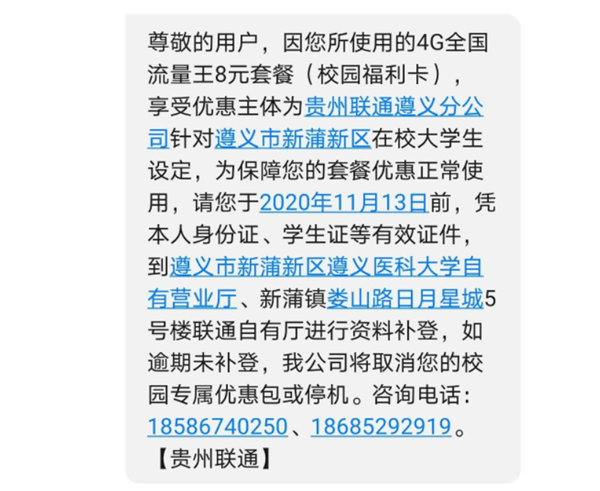 部分用戶反映校園優惠套餐被叫停?聯通解釋:卡
部分用戶反映校園優惠套餐被叫停?聯通解釋:卡
-
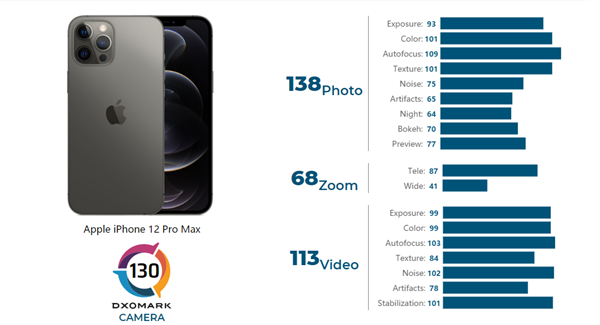 DXO公布iPhone 12 Pro Max評分:挑戰Mate40 Pro輸了
DXO公布iPhone 12 Pro Max評分:挑戰Mate40 Pro輸了
-
 李楠表示:iPhone 12 mini是工業設計之巔 Max版墊底
李楠表示:iPhone 12 mini是工業設計之巔 Max版墊底